Biped Results
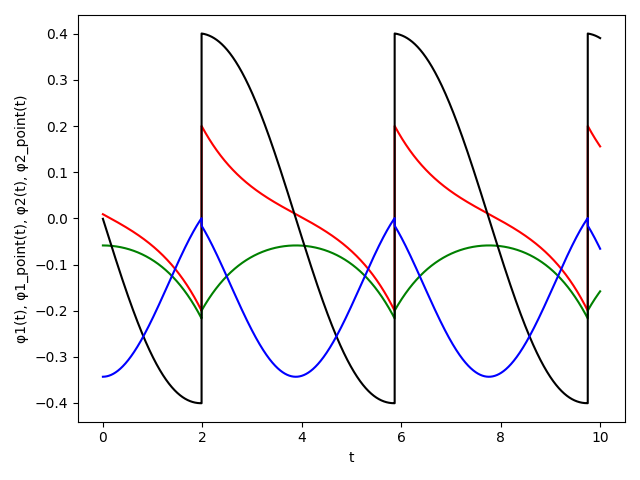
Oscillators
Simutation of \((\phi_1(t), \dot{\phi}_1(t), \phi_2(t), \dot{\phi}_2(t))\).
Image1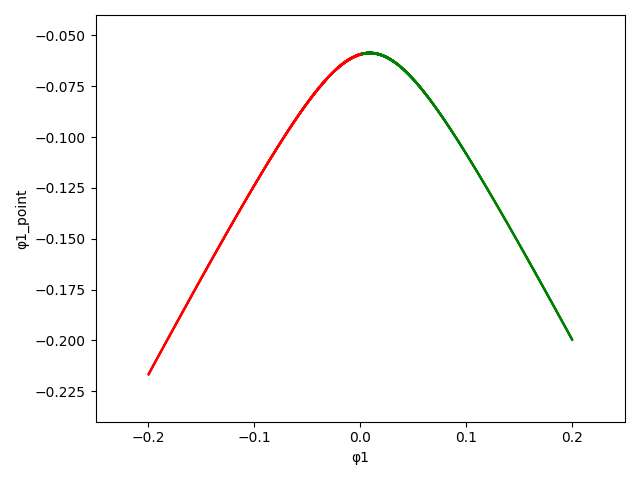
Cyclic Trajectory
for plan \(\phi_1\).
Image2
Cyclic Trajectory
for plan \(\phi_2\).
Image3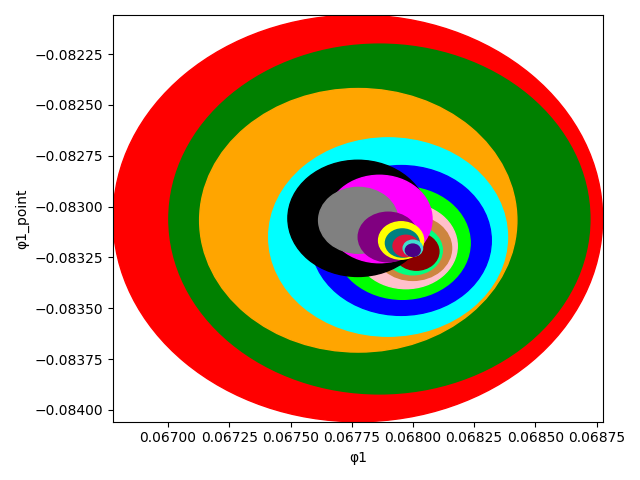
Periods
for plan \(\phi_1\).
Image4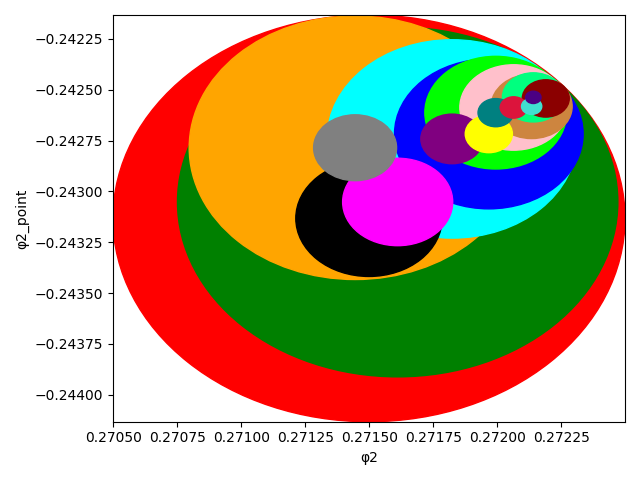
Periods
for plan \(\phi_2\).
Image5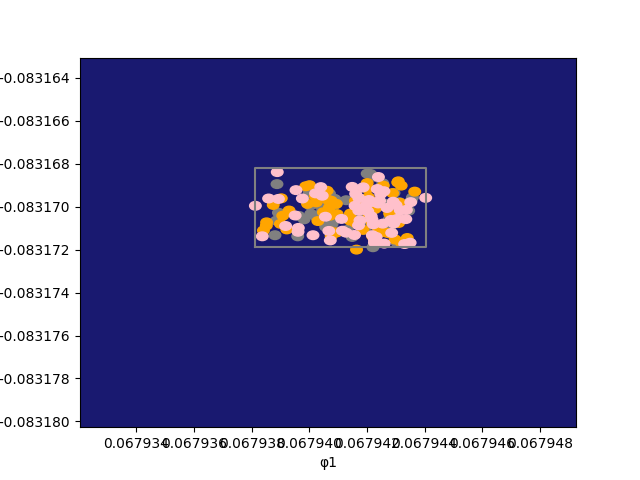
Synchronization with parallelogram's origin
for plan \(\phi_1\).
Image6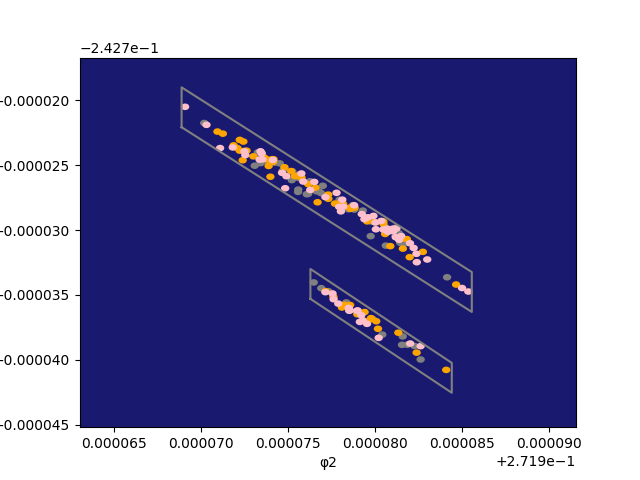
Synchronization with parallelogram's origin
for plan \(\phi_2\).
Image7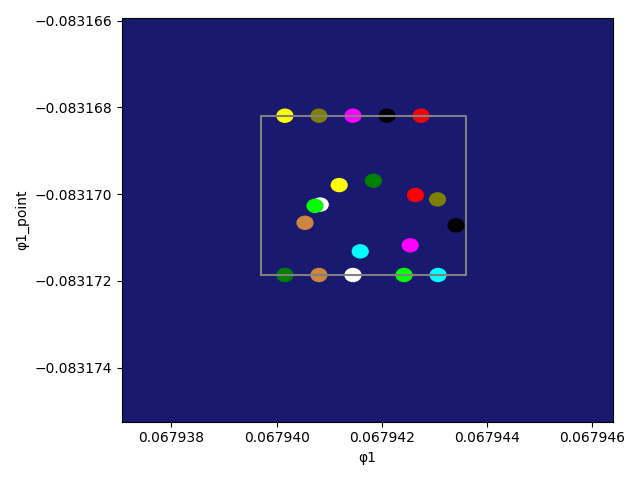
Synchronization
for plan \(\phi_1\).
Image8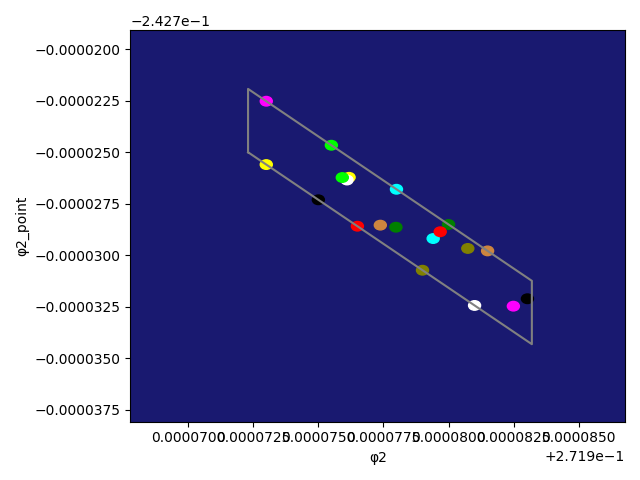
Synchronization
for plan \(\phi_2\).
Image9